Program Overview
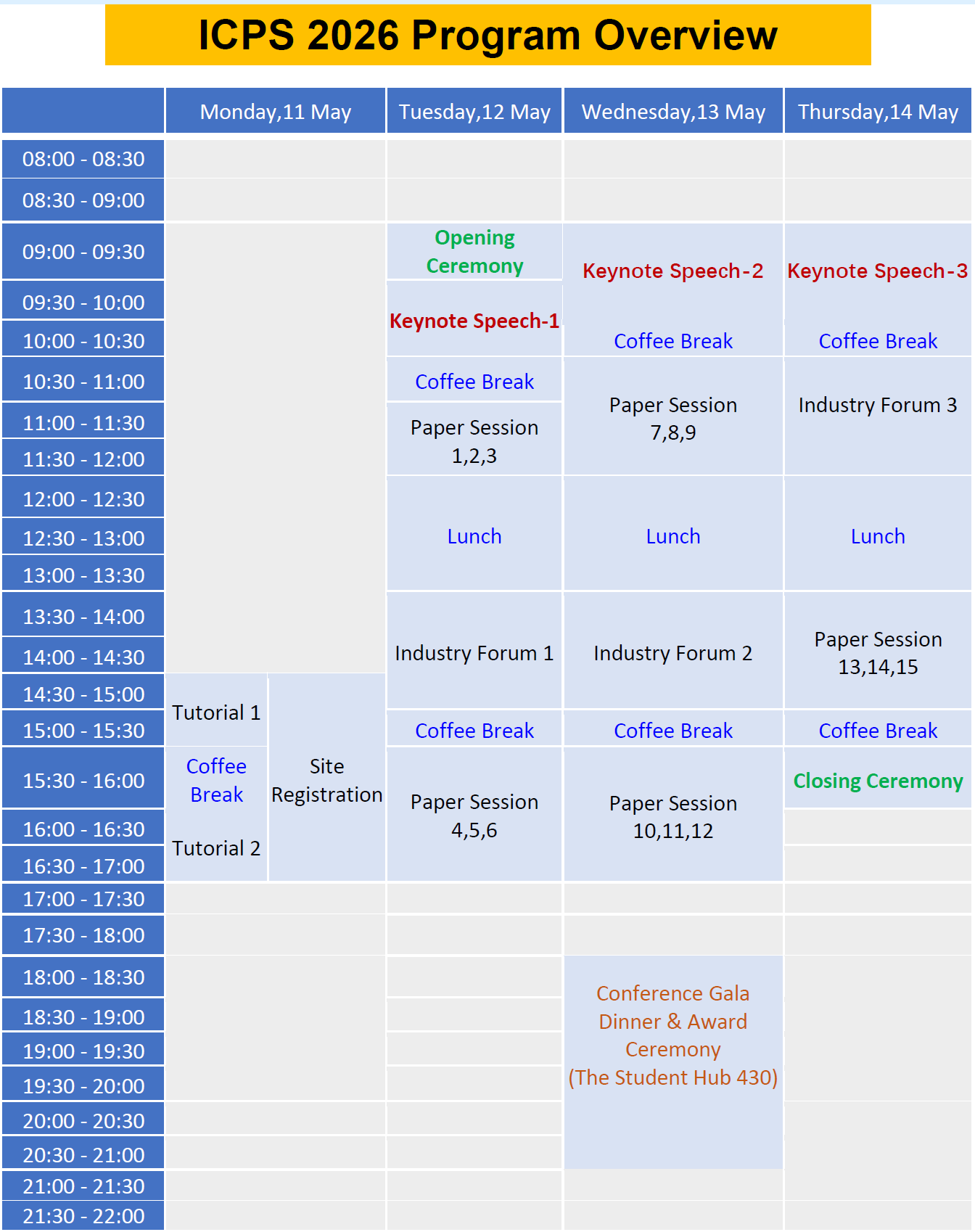
Please see the detailed conference program below. All times shown in the program are listed in Perth local time, Australian Western Standard Time (AWST, UTC+8).
Keynote Speakers

Keynote: Distributed coordination control of multi-agent systems
Qing-Long Han, Distinguished Professor Swinburne University of Technology, Australia
Member of Academia Europaea
IEEE Fellow, IFAC Fellow, ACA Fellow, Honorary IEAust Fellow, CAA Fellow
Pro Vice-Chancellor (Research Quality), Swinburne University of Technology
Tuesday, 12 May 2026, 9:30–10:30am, Room 360.3.011
Abstract
Sampling and communication are both crucial for coordination in multi-agent systems (MASs), with sampling capturing raw data from the environment for control decision making, and communication ensuring the data is shared effectively for synchronized and informed control decisions across agents. However, practical MASs often operate in environments where continuous and synchronous data samplings and exchanges are impractical, necessitating strategies that can handle intermittent sampling and communication constraints. This Keynote Speech will provide a comprehensive survey of recent advances in distributed coordination control of MASs under intermittent sampling and communication, focusing on both foundational principles and state-of-the-art techniques. After introducing fundamentals, such as communication topologies, agent dynamics, control laws, and typical coordination objectives, the distinctions between sampling and communication are elaborated, exploring deterministic versus random, synchronous versus asynchronous, and instantaneous versus sequential scenarios. A detailed review of emerging trends and techniques is then presented, covering time-triggered, event-triggered, communication-protocol-based, and denial-of-service-resilient coordination control. These techniques are analyzed across various attack models, including those based on data loss, sampled data, time constraints, and topology switching. By synthesizing these developments, this survey aims to equip researchers and practitioners with a clearer understanding of current challenges and methodologies, concluding with insights into promising future directions.
Biography
Professor Han is currently Pro Vice-Chancellor (Research Quality) and a Distinguished Professor at Swinburne University of Technology, Melbourne, Australia. He held various academic and management positions at Griffith University, Central Queensland University, Australia, Southern Illinois University Edwardsville, USA, and École Nationale Supérieure d’Ingénieurs de Poitiers, France. His research interests include networked control systems, multi-agent systems, time-delay systems, smart grids, unmanned surface vehicles, and neural networks.
Professor Han was awarded the 2024 IEEE Dr.-Ing. Eugene Mittelmann Achievement Award (Highest Achievement Award in Industrial Electronics), the 2024 Chinese Association of Automation (CAA) Science and Technology Achievement Award (the CAA’s Highest Achievement Award in Automation, Information and Intelligent Science), the 2021 Norbert Wiener Award (the Highest Achievement Award in Systems Science and Engineering, and Cybernetics), and the 2021 M. A. Sargent Medal (the Highest Achievement Award of the Electrical College Board of Engineers Australia). He was the recipient of the Journal of Systems Science and Complexity Best Paper Award in 2023, the IEEE Systems, Man, and Cybernetics Society Andrew P. Sage Best Transactions Paper Award in 2019, 2020, and 2022, respectively, the IEEE/CAA Journal of Automatica Sinica Norbert Wiener Review Award in 2020, the IEEE Transactions on Industrial Informatics Outstanding Paper Award in 2020, and the IET Control Theory and Applications Premium (Best Paper) Award in 2020 and 2016, respectively.
Professor Han is a Foreign Member of the Academia Europaea (The Academy of Europe). He is a Fellow of the International Federation of Automatic Control (FIFAC), a Fellow of the Institute of Electrical and Electronics Engineers (FIEEE), a Fellow of the Asian Control Association (FACA), an Honorary Fellow of the Institution of Engineers Australia (HonFIEAust), and a Fellow of the Chinese Association of Automation (FCAA). He is a Highly Cited Researcher in both Engineering and Computer Science (Clarivate). He has served as an AdCom Member of IEEE Industrial Electronics Society (IES), a Member of IEEE IES Fellows Committee, a Member of IEEE IES Publications Committee, Chair of IEEE IES Technical Committee on Network-Based Control Systems and Applications, and the Co-Editor-in-Chief of IEEE Transactions on Industrial Informatics. He is currently the President-Elect, an Executive Board Member, and a Steering Committee Member of the Asian Control Association (ACA). He is currently the Vice-President of the Chinese Association of Automation (CAA). He is currently the Editor-in-Chief of IEEE/CAA Journal of Automatica Sinica and the Co-Editor of Australian Journal of Electrical and Electronic Engineering.
Keynote: Human-Robot Collaboration: Challenges, Enabling Methodologies and Case Studies
Dikai Liu, PhD Distinguished Professor, University of Technology Sydney
Director, ARC Research Hub for Human-Robot Teaming for Sustainable and Resilient Construction
School of Mechanical and Mechatronic Engineering, University of Technology Sydney, Australia
Weblink: https://profiles.uts.edu.au/Dikai.Liu
Wednesday, 13 May 2026, 9:00–10:00am, Room 360.3.011
Abstract
As robotics and AI advance rapidly, robots are becoming increasingly capable of operating collaboratively with humans. This evolution will profoundly transform the relationship between humans and intelligent robots empowered by AI. This talk will explore the evolving field of human-robot collaboration. Challenges and enabling methodologies will be discussed. Through a series of case studies, we will examine how intelligent robots are being designed to work alongside humans in various applications, including civil infrastructure maintenance, construction, and manufacturing. We will also discuss the dynamics of collaboration between humans and robots, examining issues such as trust, computational modelling, physical and cognitive workload, and brain-robot interface. By reflecting on lessons learnt from these case studies, we will highlight both successes and challenges.
Biography
Dikai Liu is a distinguished professor at the Robotics Institute of the University of Technology Sydney (UTS) and an IEEE RAS Distinguished Lecturer. He is Director of the ARC Research Hub for Human-Robot Teaming for Sustainable and Resilient Construction (2025-2030). He served as Co-Director of the UTS Centre for Autonomous Systems (2013-2019). His research interest lies in robotics, with a focus on field robotics and human-robot collaboration. In addition to conducting fundamental robotics research, he has been instrumental in transforming robotics research into real industry applications. Examples include autonomous robots for bridge maintenance, bio-inspired climbing robots for inspection of confined space, intelligent robotic co-worker for human-robot collaborative abrasive blasting, smart hoist for patient transfer, and autonomous robots for underwater structure maintenance. Since 2006, his research has received over 20 Best Paper and Research/Engineering Excellence awards, including the 2024 IEEE IROS Harashima Award, the 2019 UTS Medal for Research Impact, the 2019 ASME DED Leonardo da Vinci Award, and the 2016 Australian Engineering Excellence Awards. His research has been featured by reputable newspapers and TV news channels, such as the BBC, ABC, SBS, TVBS (Taiwan), Sydney Morning Herald, 7News, AFR, and The Robot Report (USA).
Keynote: Integrated Model Predictive Control (MPC) Framework for Autonomous Intelligent Mechatronic Systems
Yang Shi, Professor, Fellow of IEEE, ASME, EIC, CSME University of Victoria, Canada
Thursday, 14 May 2026, 9:00–10:00am, Online Presentation, Room 360.3.011
Abstract
Networked and distributed control for mechatronic systems have received great attention in the control community due to its wide application areas. Network-induced limitations may be caused by the presence of a communication channel, or because of the efficient assignment of power and other limited resources. Intelligent mechatronic systems represent a large class of smart systems that encompass computational (i.e., hardware and software) and physical components, seamlessly integrated and closely interacting to autonomously sense and manipulate the changing state of the physical system. These systems involve a high degree of complexity at numerous spatial and temporal scales and highly networked communications integrating computational and physical components. Model predictive control (MPC) is a promising paradigm for high-performance and cost-effective control of networked and distributed mechatronic systems. This talk will firstly summarize the major application requirements and challenges to innovate in designing, implementing, deploying and operating intelligent mechatronic systems. Further, the robust MPC and distributed MPC design methods will be presented. Finally, the application of MPC algorithms to a variety of autonomous intelligent mechatronic systems will be illustrated.
Biography
Yang SHI received his B.Sc. and Ph.D. degrees from Northwestern Polytechnical University, Xi’an, China, in 1994 and 1998, respectively, and the Ph.D. degree in electrical and computer engineering from the University of Alberta, Edmonton, AB, Canada, in 2005. He was a Postoctoral Fellow in the Department of Automation, Tsinghua University, China, during 1998-2000. From 2005 to 2009, he was an Assistant Professor and Associate Professor in the Department of Mechanical Engineering, University of Saskatchewan, Saskatoon, SK, Canada. In 2009, he joined the University of Victoria, and now he is a Professor in the Department of Mechanical Engineering, University of Victoria, Victoria, BC, Canada. His research interests include networked and distributed systems, model predictive control (MPC), cyber-physical systems (CPS), robotics and mechatronics, navigation and control of autonomous systems (AUV and UAV), and energy system applications.
On teaching and mentorship, Dr. Shi received the University of Saskatchewan Student Union Teaching Excellence Award in 2007, the Faculty of Engineering Teaching Excellence Award in 2012 at the University of Victoria (UVic), and the 2023 REACH Award for Excellence in Graduate Student Supervision and Mentorship. On research, he is the recipient of the JSPS Invitation Fellowship (short-term) in 2013, the UVic Craigdarroch Silver Medal for Excellence in Research in 2015, the Humboldt Research Fellowship for Experienced Researchers in 2018, the CSME Mechatronics Medal (2023), the IEEE Dr.-Ing. Eugene Mittelmann Achievement Award (2023), the 2024 IEEE Canada Outstanding Engineer Award, and the 2025 David H. Turpin Gold Medal for Career Achievement in Research (UVic).
He served as a Vice-President on Conference Activities of IEEE IES (2022-2025) and the Chair of IEEE IES Technical Committee on Industrial Cyber-Physical Systems. Currently, he is IFAC Council Member and Editor-in-Chief of IEEE Transactions on Industrial Electronics. He also serves as Associate Editor for Automatica, IEEE Transactions on Automatic Control, Annual Review in Controls, etc.
He is a Fellow of IEEE, ASME, CSME, Engineering Institute of Canada (EIC), Canadian Academy of Engineering (CAE), Royal Society of Canada (RSC), and a registered Professional Engineer in British Columbia, Canada.
Tutorials
- Tutorial 1: AI based control and monitoring for the modern aviation and traction systems
- Tutorial 2: Harvesting Ambient Energy Toward Self-powered IoT Systems
For detailed information about the tutorials, please check the Tutorials page.
Industry Forum
- Industry Forum 1: Industrial Digitalisation and Cybersecurity
- Industry Forum 2: Advanced Manufacturing Facility
- Industry Forum 3: Network Stability, AI, and Cybersecurity
For detailed information about the Industry Forum sessions, please check the Industry Forum page.
Social Events
Conference Gala Dinner and Award Ceremony
Wednesday, 13 May 2026, 17:30–21:00, Perth local time (AWST, UTC+8)
Student Hub, Building 430, Murdoch University
The Conference Gala Dinner and Award Ceremony will be held at the Student Hub, Murdoch University. This event will provide an excellent opportunity for delegates, speakers, authors, and guests to connect in a relaxed setting, celebrate the achievements of the conference, and enjoy an evening of networking and discussion.
Please note that participation in the Gala Dinner may depend on the registration category. Additional Gala Dinner tickets can be purchased for USD 120 per person through the registration site. Delegates are encouraged to check their registration details or contact the conference committee if clarification is required.
Full Conference Program
ICPS 2026 Conference Program PDF
Click here to open or download the full conference programTime Zone Notice: All times shown in the conference program are listed in Perth local time, Australian Western Standard Time (AWST, UTC+8). Western Australia does not observe daylight saving time.